Credits: NASA/HeroX
How do you navigate hell? It sounds like a question for an existential philosopher, but it’s also at the heart of NASA’s most recent public design challenge.
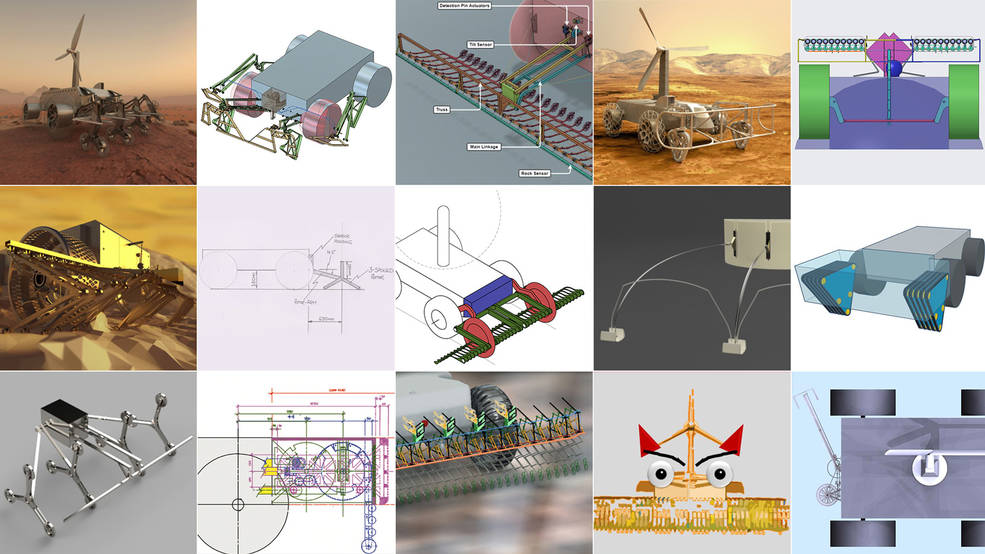
This past February, “Exploring Hell: Avoiding Obstacles on a Clockwork Rover” tasked entrants to come up with an obstacle avoidance sensor for a future Venus rover. The sensor must be able to detect and navigate obstructions like rocks, crevices, and steep terrain, all while surviving Venus’s hellish weather conditions. A total of 572 entries from a mix of teams and individuals were submitted from 82 countries. On Monday, NASA announced the winners.
Youssef Ghali, an Egyptian architect and product designer, received first place for his “Venus Feelers” design. The winning entry earned Ghali a $15,000 prize. Second place went to “Skid n’ Bump – All-mechanical, Mostly Passive” by Team Rovetronics. Third place went to “Direction Biased Obstacle Sensor (DBOS)” by Callum Heron. Those teams won $10,000 and $5,000, respectively.
“The response from the community was incredible and better than I ever dreamed,” said Jonathan Sauder, a senior mechatronics engineer at the Jet Propulsion Laboratory (JPL). “There were so many great ideas and well-developed concepts that in addition to first, second, and third place, we decided to add two finalists and another 10 honorable mentions in recognition of the amazing work people put into this project.”
Sauder currently leads a project at JPL called AREE, or Automaton Rover for Extreme Environments. The goal is to build a rover that can spend extensive time on the surface of Venus collecting data––think months, not minutes. This is way harder than you might think.
Venus is sometimes called Earth’s sister planet because it shares many compositional similarities. Both are rocky planets roughly similar in size and density, and Venus is only about 30% closer to the sun than Earth. But it’s the differences in weather conditions that make designing a vehicle for Venus a Herculean task. The surface pressure on Venus is 90 times that of Earth, and temperatures can reach upwards of 840 degrees Fahrenheit. Most current state-of-the-art electronics fail at anything over 250 degrees Fahrenheit.
To meet the challenges of pressure and heat, AREE uses a mechanical locomotion approach capable of performing complex sequences of operations and instructions autonomously. The design relies on a small wind turbine connected to a series of springs, which allows the rover to generate and store mechanical energy. A simple analogy would be how a wind-up pocket watch uses stored energy to drive the motion of its internal gears.
By replacing delicate electronics with gears made from heat-resistant alloys, AREE would theoretically be able to undertake an extended mission on Venus. A prolonged study of the geology across the surface of Venus would not only help us understand the planet’s evolution, but it could also offer insight into Earth’s own climate.
Yet even if sensors function for the long haul, there’s still the issue of navigating the extreme surface conditions. That’s where the design competition came in.
Ghali’s entry detects obstacles through an inclinometer system of extended front sensor wheels connected to springs through cables. If, for example, the wheel system is tilted too high by an impassable rock or too low by a steep drop, it triggers a spring that brakes the rover, then puts it in reverse.
Here’s how Ghali explains the slope detection system in the comments of the design video he posted on YouTube:
“Two separate but identical inclinometer devices are fixed to the body of the rover at right angles from each other. Each device detects the tilt of the rover in one direction (pitch and roll). Once the tilt reaches 30º (-ve or +ve) , it releases the energy stored in a compression spring to draw a Bowden cable that triggers a stop pin. The rover is programmed to stop, go backwards and seek new path once that pin is pressed.”
Should AREE actually go to Venus, it would be NASA’s first mission (not just a fly-by) to Venus since Magellan was launched in 1989 to map the planet’s surface.
This past February, NASA announced four possible missions for future exploration of the solar system. All four received $3 million in funding to complete their proposals. Two of those projects––DAVINCI+ and VERITAS––would go to Venus.
For now, all four prospective missions will be studied and refined through the end of 2020, with a goal to select two to launch at some point in the 2020s.